
自作ミニCNCフライス製作-制御編
機械系は完成したので、お次は制御です。制御はGRBLで行います。構成はArduino UNO + CNCシールド(Ver.3.0) + A4988です。
grbl1.1を使おうかと思っていましたが、[Override refresh must be greater than zero.]というエラーが出たためgrbl0.9を書き込みました。よく分かりません(゜_゜)
使用パーツ
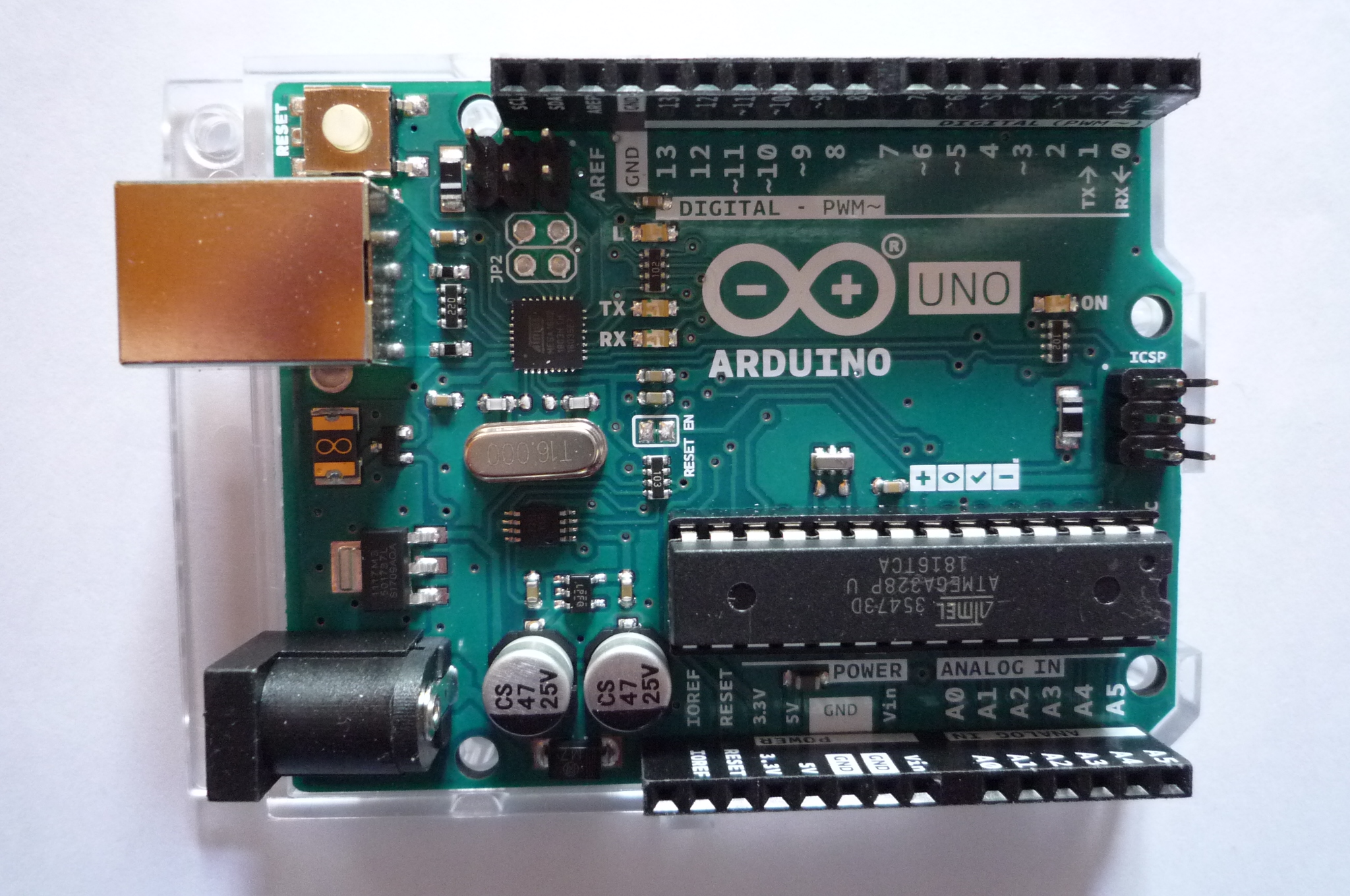
Arduino UNOは正規品を購入しました。2940円でした。
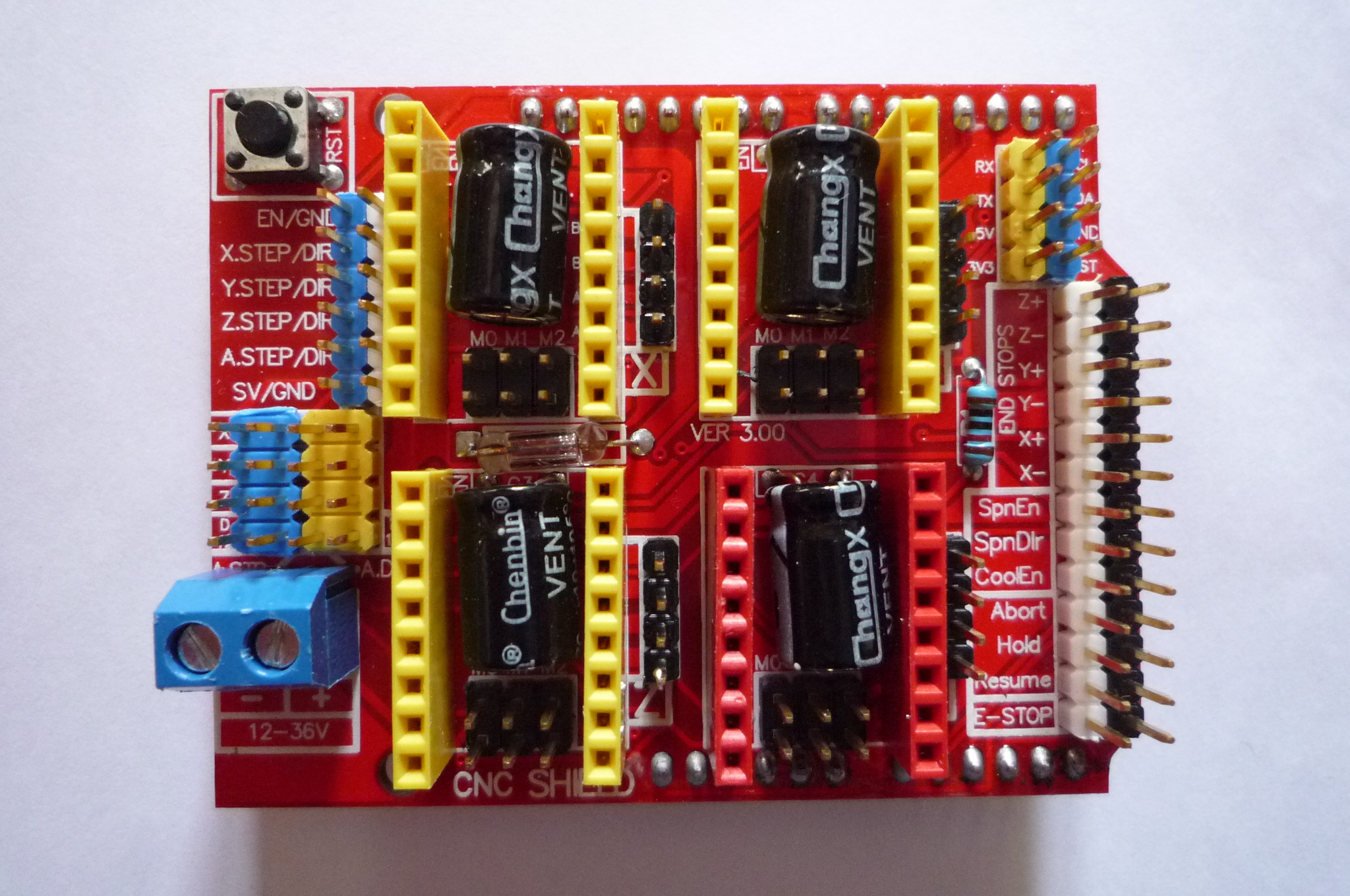
CNCシールドver.3.0は2つで850円でした。

モータードライバーは5つセットで870円です。

ヒートシンクも付いています。もちろん5つ。
付属の両面テープで貼りつけました。
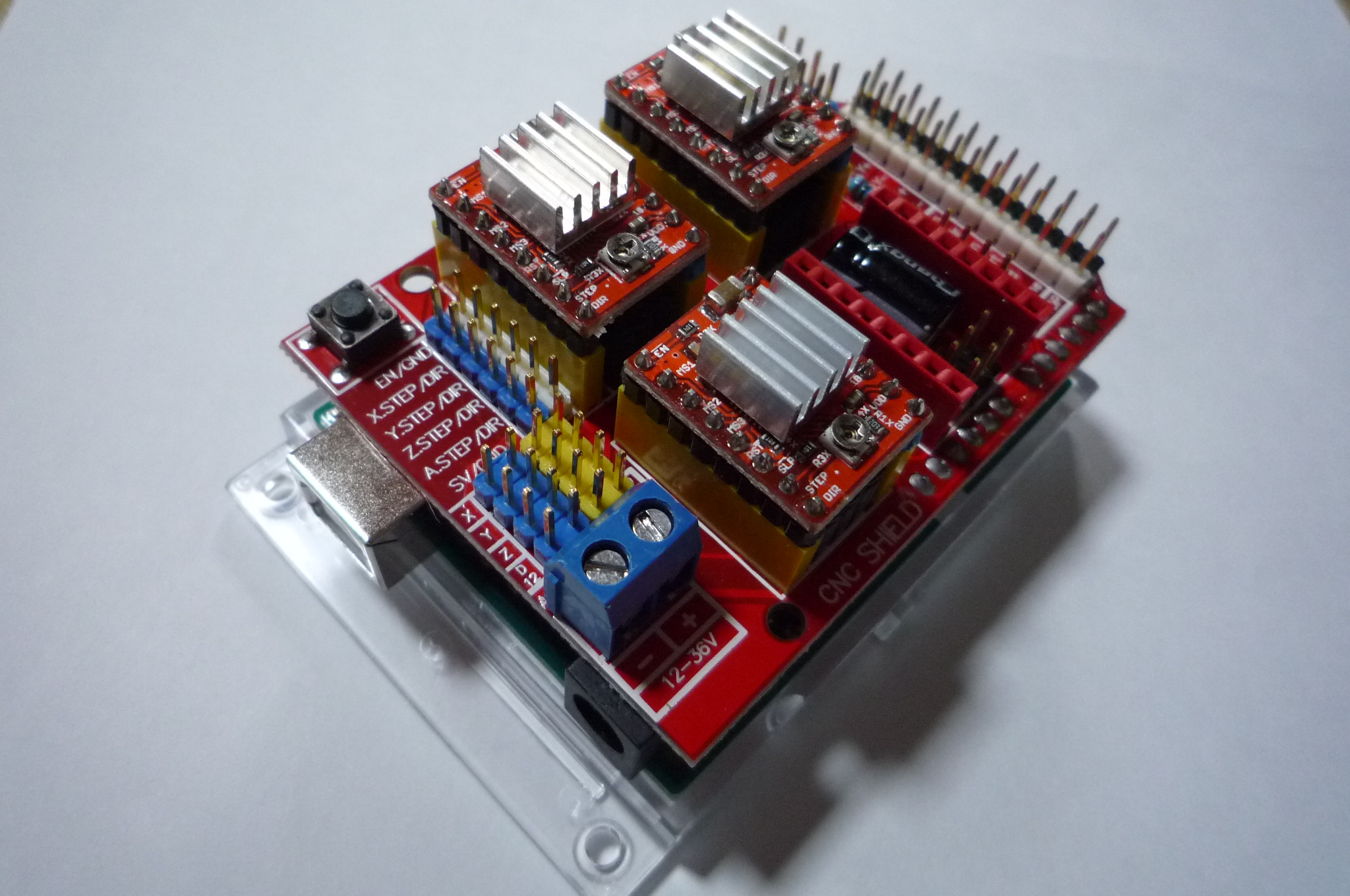
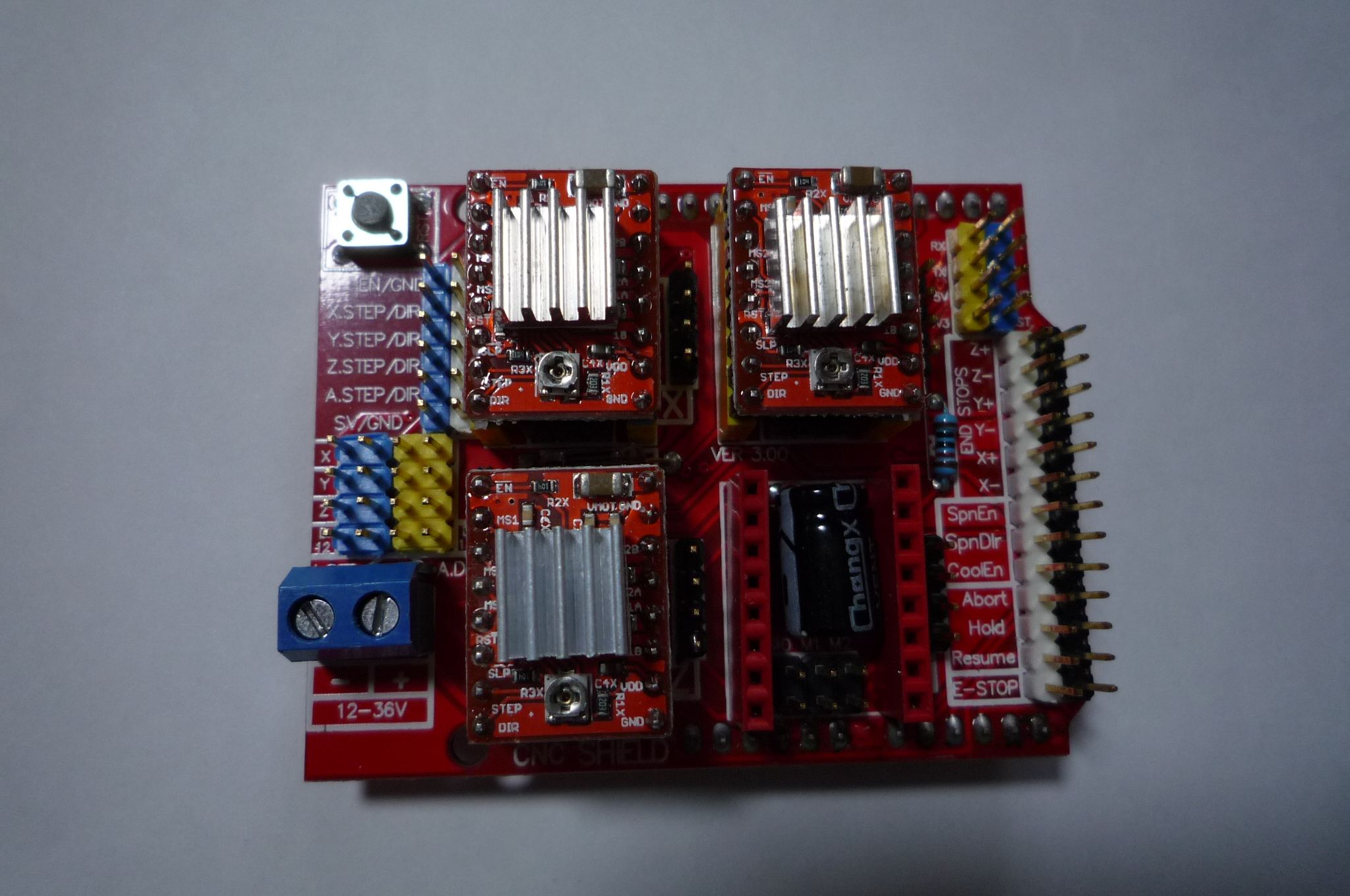
Arduinoに載せるとこうなります。
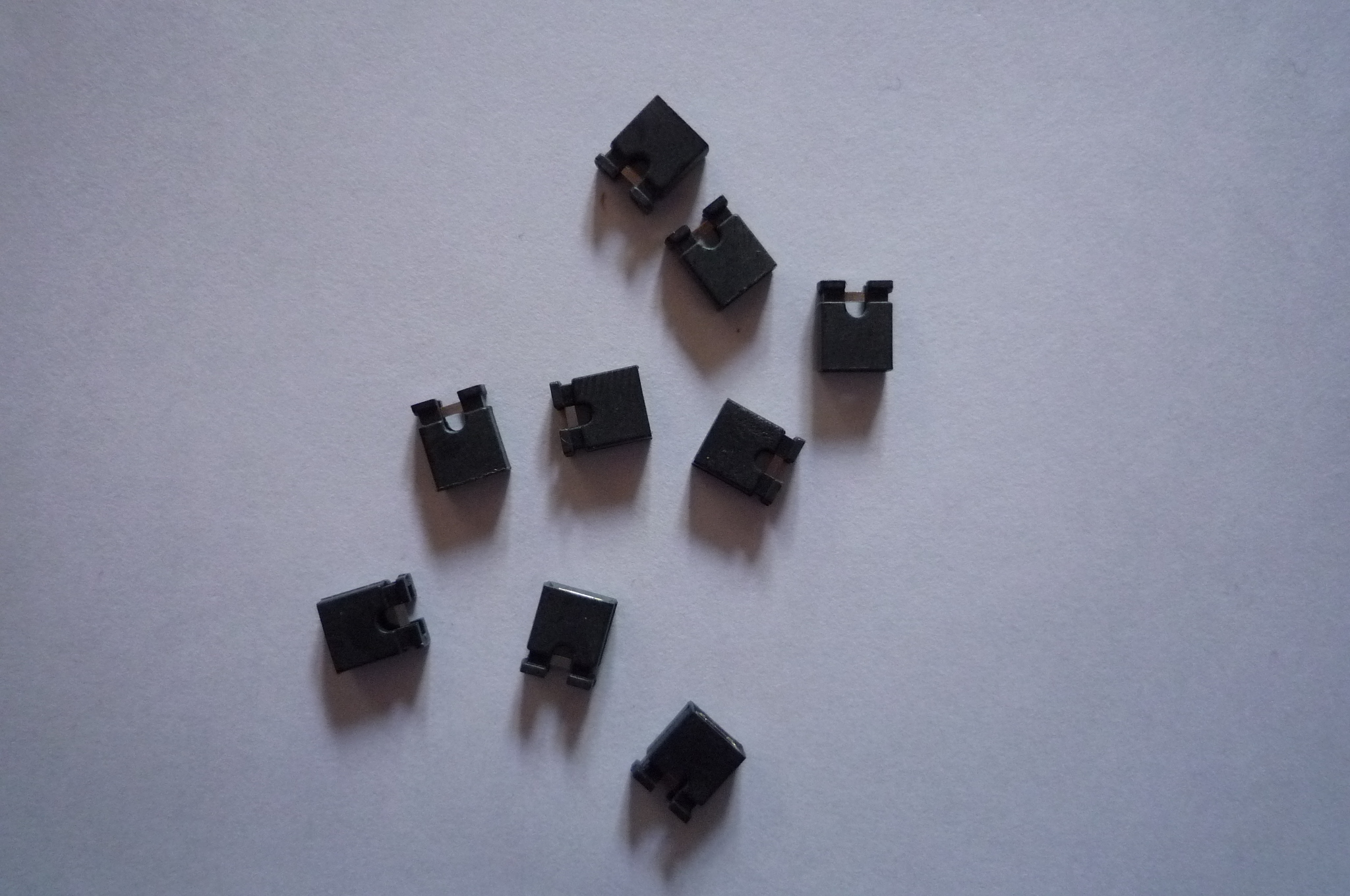
マイクロステップ用にジャンパーピンも購入しておきました。
モーター配線

ステッピングモーターは昔秋月電子で購入していたST-42BYG020を使います。

コネクタも買っておいた方が良いです。
このモーターはユニポーラタイプでモータードライバはバイポーラ用なのでモーターをバイポーラ接続します。ユニポーラタイプのモーターをバイポーラとして使うにはフルコイルとハーフコイルという使い方があるそうです。
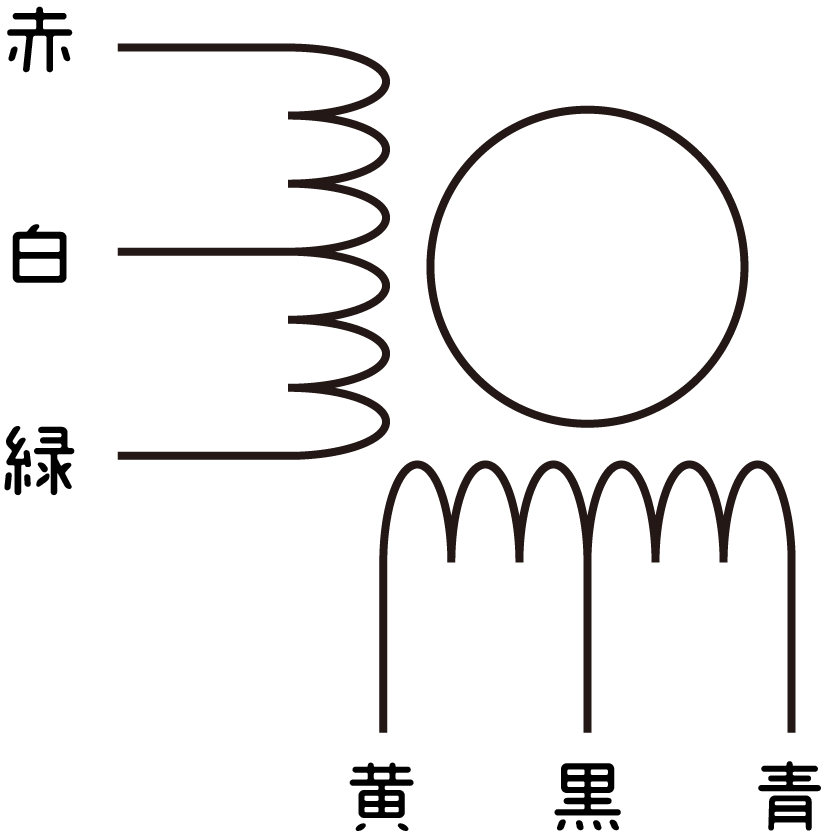
モーターの配線はこのようになっています。
フルコイルは上図のようにコイル全体を使います。

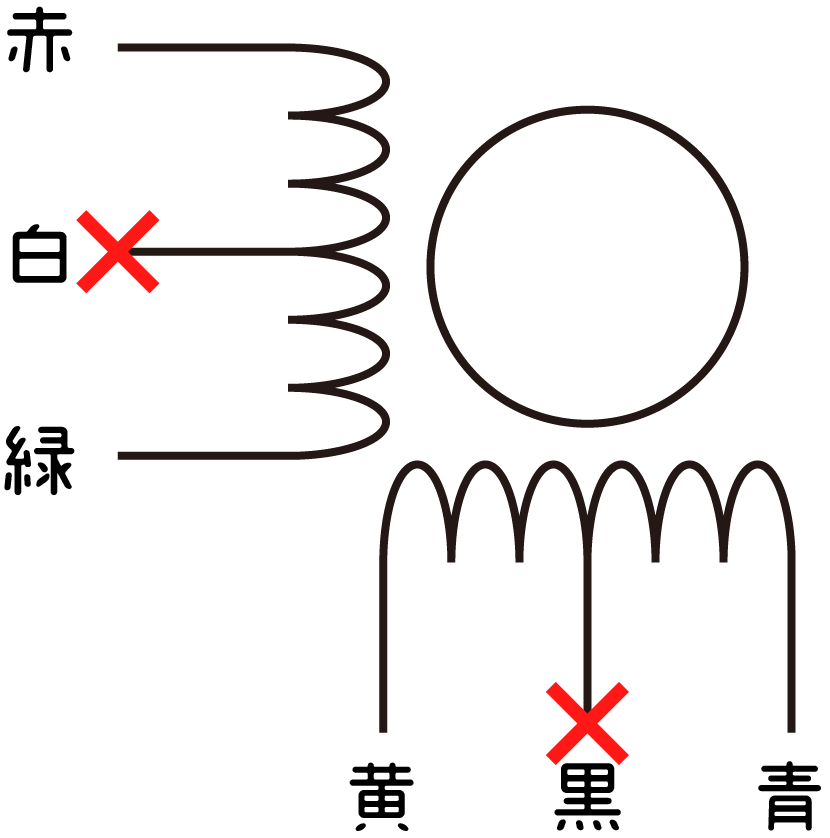
ハーフコイルはこのようにコイルを半分しか使っていません。
テスターで測定してみると、ハーフコイル(白と赤に接続)の場合コイルの抵抗値は約21Ωとなりました。フルコイル(黒と黄に接続)の場合抵抗値は42Ωとなりました。
このモーターは12Vで0.6A/相から12V / 0.6A = 20Ωなので大方合っています。
フルコイルは低い電流値で使えますが、ハーフコイルと比べて高速回転域でトルクが低くなるそうです。どの辺りから高速回転域になるのかわかりませんが、今回はハーフコイルで使用することにします。
モータードライバの設定
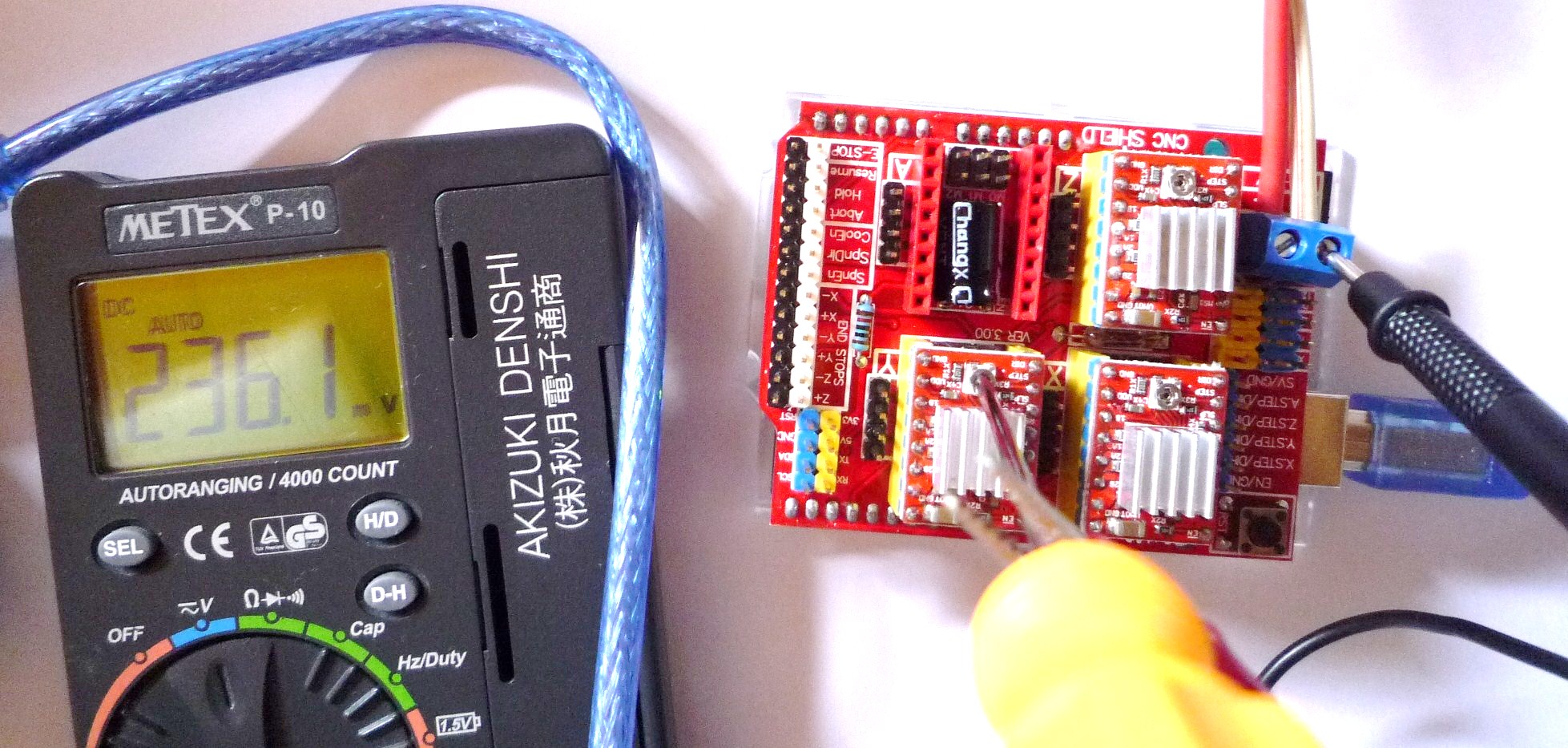
Current Limit = Vref x 2.5という計算式から0.6A / 2.5 = 0.24Vで値は0.24V以下に設定しました。
動作テスト
送りネジと接続し動かしてみましたが、バックラッシュを殺して作動させると脱調しました(T-T)このままでは使えないためナット部分も3Dプリンターで作り樹脂ナット製に変更します。樹脂ナットの方が摩擦が少ないと思うので…。もうしばらくお付き合いください(-_-;)